
Micromobility solutions—such as delivery robots, mobility scooters, and electric wheelchairs—are rapidly transforming short-distance urban travel. Despite their growing popularity as flexible, eco-friendly transport alternatives, most micromobility devices still rely heavily on human control. This dependence limits operational efficiency and raises safety concerns, especially in complex, crowded city environments filled with dynamic obstacles like pedestrians and cyclists.
The Need for Autonomous Micromobility in Urban Spaces
Traditional transportation methods like cars and buses are ideal for long-distance travel but often struggle with last-mile connectivity—the final leg in urban journeys. Micromobility fills this gap by offering lightweight, low-speed devices that excel in short urban trips. However, true autonomy in micromobility remains elusive: current AI solutions tend to focus narrowly on specific tasks such as obstacle avoidance or simple navigation, failing to address the multifaceted challenges posed by real urban environments that include uneven terrain, stairs, and dense crowds.
Limitations of Existing Robot Learning and Simulation Platforms
Most simulation platforms for robot training are tailored for indoor environments or vehicle-centric road networks and lack the contextual richness and complexity found in urban sidewalks, plazas, and alleys. Meanwhile, highly efficient platforms often provide simplified scenes unsuitable for deep learning in environments with diverse obstacles and unpredictable pedestrian movements. This gap restricts the ability of AI agents to effectively learn critical skills for autonomous micromobility.
Introducing URBAN-SIM: High-Performance Simulation for Urban Micromobility
To address these challenges, researchers from the University of California, Los Angeles, and the University of Washington developed URBAN-SIM, a scalable, high-fidelity urban simulation platform designed explicitly for autonomous micromobility research.
Key Features of URBAN-SIM:
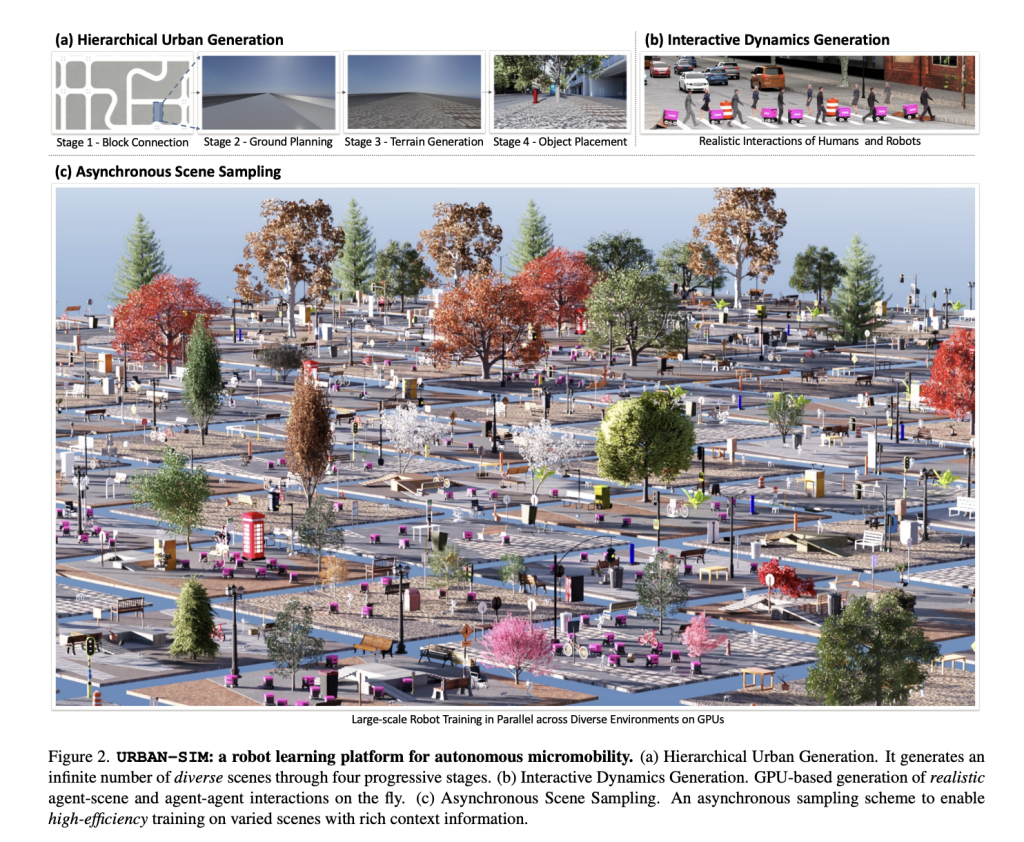
- Hierarchical Urban Scene Generation
Procedurally creates infinitely diverse, large-scale urban environments—from street blocks to detailed terrain features—that include sidewalks, ramps, stairs, and uneven surfaces. This layered pipeline ensures a realistic and varied setting for robot training. - Interactive Dynamic Agent Simulation
Simulates responsive pedestrians, cyclists, and vehicles in real-time on GPUs, enabling complex multi-agent interactions that mimic true urban dynamics. - Asynchronous Scene Sampling for Scalability
Enables parallel training of AI agents across hundreds of unique and complex urban scenes on a single GPU, dramatically boosting training speed and promoting robust policy learning.
Built on NVIDIA’s Omniverse and PhysX physics engine, URBAN-SIM combines realistic visual rendering with precision physics for authentic embodied AI training.
URBAN-BENCH: Comprehensive Benchmark Suite for Real-World Skills
Complementing URBAN-SIM, the team created URBAN-BENCH, a task suite and benchmark framework that captures essential autonomous micromobility capabilities grounded in actual urban usage scenarios. URBAN-BENCH includes:
- Urban Locomotion Tasks: Traversing flat surfaces, slopes, stairs, and rough terrain to ensure stable and efficient robot movement.
- Urban Navigation Tasks: Navigating clear pathways, avoiding static obstacles like benches and trash bins, and managing dynamic obstacles such as moving pedestrians and cyclists.
- Urban Traverse Task: A challenging kilometer-scale journey combining complex terrains, obstacles, and dynamic agents, designed to test long-horizon navigation and decision-making.
Human-AI Shared Autonomy Approach
For the long-distance urban traverse task, URBAN-BENCH introduces a human-AI shared autonomy model. This flexible control architecture decomposes the robot’s control system into layers—high-level decision making, mid-level navigation, and low-level locomotion—allowing humans to intervene in complex or risky scenarios while enabling AI to manage routine navigation and movement. This collaboration balances safety and efficiency in dynamic urban settings.
Evaluating Diverse Robots in Realistic Tasks
URBAN-SIM and URBAN-BENCH support a wide range of robotic platforms, including wheeled, quadruped, wheeled-legged, and humanoid robots. Benchmarks reveal unique strengths and weaknesses for each robot type across locomotion and navigation challenges, illustrating the platform’s generalizability.
For example:
- Quadruped robots excel in stability and stair traversal.
- Wheeled robots perform best on clear, flat paths.
- Wheeled-legged robots leverage their hybrid design for combined terrain adaptability.
- Humanoid robots effectively navigate narrow, crowded urban spaces by sidestepping.
Scalability and Training Efficiency
The asynchronous scene sampling strategy enables training across diverse urban scenes, demonstrating up to a 26.3% performance improvement over synchronous training methods. Increasing the diversity of training environments directly correlates with higher success rates in navigation tasks, highlighting the necessity of large-scale, varied simulation for robust autonomous micromobility.
Conclusion
URBAN-SIM and URBAN-BENCH represent vital steps toward enabling safe, efficient, and scalable autonomous micromobility in complex urban settings. Future work aims to bridge simulation and real-world deployment through ROS 2 integration and sim-to-real transfer techniques. Additionally, the platform will evolve to incorporate multi-modal perception and manipulation capabilities necessary for comprehensive urban robot applications such as parcel delivery and assistive robotics.
By enabling scalable training and benchmarking of embodied AI agents in authentic urban scenarios, this research catalyzes progress in autonomous micromobility—promoting sustainable urban development, enhancing accessibility, and improving safety in public spaces.
Check out the Paper and Code. All credit for this research goes to the researchers of this project. SUBSCRIBE NOW to our AI Newsletter
The post URBAN-SIM: Advancing Autonomous Micromobility with Scalable Urban Simulation appeared first on MarkTechPost.
Source: Read MoreÂ

